«Junta en U» redirige aquí. Para el accesorio de fontanería, véase Curva en U.
Una junta universal
Una junta universal (también llamada acoplamiento universal o junta en U) es una junta o acoplamiento que conecta ejes rígidos cuyos ejes están inclinados entre sí. Se suele utilizar en ejes que transmiten movimientos giratorios. Consiste en un par de bisagras situadas cerca una de otra, orientadas a 90° entre sí, conectadas por un eje transversal. La junta universal no es una junta de velocidad constante.
Las juntas universales también se denominan a veces con varios nombres epónimos, como sigue:
- Junta Cardan, por Gerolamo Cardano, un polímata del siglo XVI que contribuyó al conocimiento de varios mecanismos ingeniosos, incluidos los cardanes
- Junta Hooke o junta de Hooke, por Robert Hooke, un polímata del siglo XVII que contribuyó al conocimiento de varios mecanismos ingeniosos
- Junta Spicer, por Clarence W. Spicer y la Spicer Manufacturing Company, que fabricaba juntas en U
- Junta Hardy Spicer, por la marca Hardy Spicer, sucesora de la marca Spicer
Historia
Este vídeo muestra diferentes partes y funcionamiento del eje universal.

Juntas universales Spicer para coches de motor, 1916.
El concepto principal de la junta universal se basa en el diseño de cardanes, que se han utilizado desde la antigüedad. Una de las anticipaciones de la junta universal fue su uso por los antiguos griegos en las ballestas. En Europa, la junta universal suele llamarse junta de Cardano (y un eje de transmisión que utiliza las juntas, un eje de Cardán), en honor al matemático italiano Gerolamo Cardano, que fue uno de los primeros escritores sobre cardanes, aunque sus escritos sólo mencionaban montajes de cardanes, no juntas universales.
El mecanismo fue descrito más tarde en Technica curiosa sive mirabilia artis (1664) por Gaspar Schott, que afirmó erróneamente que era una junta de velocidad constante. Poco después, entre 1667 y 1675, Robert Hooke analizó la articulación y descubrió que su velocidad de rotación no era uniforme, pero que esta propiedad podía utilizarse para seguir el movimiento de la sombra en la cara de un reloj de sol. De hecho, el componente de la ecuación del tiempo que da cuenta de la inclinación del plano ecuatorial con respecto a la eclíptica es totalmente análogo a la descripción matemática de la junta universal. El primer uso registrado del término junta universal para este dispositivo fue realizado por Hooke en 1676, en su libro Helioscopes. Publicó una descripción en 1678, lo que dio lugar al uso del término junta de Hooke en el mundo anglosajón. En 1683, Hooke propuso una solución a la velocidad de rotación no uniforme de la junta universal: un par de juntas de Hooke desfasadas 90º en cada extremo de un eje intermedio, una disposición que ahora se conoce como un tipo de junta de velocidad constante. El sueco Christopher Polhem reinventó posteriormente la junta universal, dando lugar al nombre de Polhemsknut («nudo de Polhem») en sueco.
En 1841, el científico inglés Robert Willis analizó el movimiento de la junta universal. En 1845, el ingeniero y matemático francés Jean-Victor Poncelet había analizado el movimiento de la junta universal utilizando la trigonometría esférica.
El término junta universal se utilizó en el siglo XVIII y fue de uso común en el siglo XIX. La patente de 1844 de Edmund Morewood para una máquina de revestimiento de metales pedía una junta universal, con ese nombre, para acomodar pequeños errores de alineación entre los ejes de la locomotora y del tren de laminación. La patente de locomotora de Ephriam Shay de 1881, por ejemplo, utilizaba juntas universales dobles en el eje de transmisión de la locomotora. Charles Amidon utilizó una junta universal mucho más pequeña en su puntal patentado en 1884. La máquina de vapor esférica, rotativa y de alta velocidad de Beauchamp Tower utilizó una adaptación de la junta universal hacia 1885.
El término junta Cardan parece ser un recién llegado a la lengua inglesa. Muchos de los primeros usos en el siglo XIX aparecen en traducciones del francés o están fuertemente influenciados por el uso francés. Algunos ejemplos son un informe de 1868 sobre la Exposition Universelle de 1867 y un artículo sobre el dinamómetro traducido del francés en 1881.
En el siglo XX, Clarence W. Spicer y la Spicer Manufacturing Company, así como la marca sucesora de Hardy Spicer, ayudaron a popularizar aún más las juntas universales en las industrias de la automoción, los equipos agrícolas, los equipos pesados y la maquinaria industrial.
Ecuación del movimiento

Diagrama de las variables de la junta universal. El eje 1 es perpendicular al plano rojo y el eje 2 es perpendicular al plano azul en todo momento. Estos planos forman un ángulo β entre sí. El desplazamiento angular (posición rotacional) de cada eje viene dado por γ 1 {\displaystyle \gamma _{1}}

y γ 2 {pantalla \gamma _{2}}

respectivamente, que son los ángulos de los vectores unitarios x ^ 1 {\displaystyle {\hat {x}_{1}

y x ^ 2 {displaystyle {\hat {x}_{2}}

con respecto a sus posiciones iniciales a lo largo de los ejes x e y. El x ^ 1 {\displaystyle {\hat {x}}_{1}}
y x ^ 2 {\displaystyle {\hat {x}}_{2}}
están fijados por el cardán que conecta los dos ejes y, por tanto, están obligados a permanecer perpendiculares entre sí en todo momento.
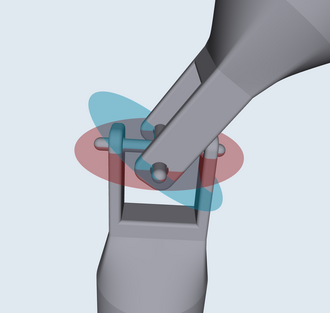
Un ejemplo de junta universal codificada por colores según los diagramas de la ecuación de movimiento. Los planos rojo y azul son visibles.
Velocidad angular (de rotación) del eje de salida ω 2 {\displaystyle \omega _{2}\},}

frente al ángulo de rotación γ 1 {\displaystyle \gamma _{1}\},}

para diferentes ángulos de curvatura β {\displaystyle \beta \},} \beta \\_6331>de la articulación
Ángulo de rotación del eje de salida, γ 2 {\displaystyle \gamma _{2}\},}

frente al ángulo de giro del eje de entrada γ 1 {\displaystyle \gamma _{1}\},}
para diferentes ángulos de curvatura β {\displaystyle \beta \},} \beta \}, de la junta
La junta Cardan sufre un problema importante: incluso cuando el eje del árbol de transmisión de entrada gira a una velocidad constante, el eje del árbol de transmisión de salida gira a una velocidad variable, lo que provoca vibraciones y desgaste. La variación de la velocidad del eje conducido depende de la configuración de la junta, que se especifica mediante tres variables:
- γ 1 {\displaystyle \gamma _{1}} el ángulo de rotación del eje 1
- γ 2 {\displaystyle \gamma _{2}} el ángulo de rotación para el eje 2
- β {\displaystyle \beta }
 el ángulo de flexión de la articulación, o ángulo de los ejes entre sí, siendo cero paralelo o recto.
el ángulo de flexión de la articulación, o ángulo de los ejes entre sí, siendo cero paralelo o recto.
Estas variables se ilustran en el diagrama de la derecha. También se muestra un conjunto de ejes de coordenadas fijas con vectores unitarios x ^ {\displaystyle {\hat {\mathbf {x}}. }}} {\hat {\mathbf {x}} e y ^ {\displaystyle {\hat {\mathbf {y}} }}} {\hat {\mathbf {y}} y los planos de rotación de cada eje. Estos planos de rotación son perpendiculares a los ejes de rotación y no se mueven a medida que los ejes giran. Los dos ejes están unidos por un cardán que no se muestra. Sin embargo, el eje 1 se une al cardán en los puntos rojos del plano rojo de rotación en el diagrama, y el eje 2 se une en los puntos azules del plano azul. Los sistemas de coordenadas fijados con respecto a los ejes de rotación se definen como teniendo sus vectores unitarios del eje x ( x ^ 1 {\displaystyle {\hat {\mathbf {x} }}_{1}} {hat {\mathbf {x}} {{1}}} y x ^ 2 {{pantalla}{hat}{mathbf}{x}} }}_{2}} {que {\a} {mathbf {x}} }_{2}) apuntando desde el origen hacia uno de los puntos de conexión. Como se muestra en el diagrama, x ^ 1 {\displaystyle {\hat {\mathbf {x}} }}_{1}} {jato {mathbf {x}} {5888> está en el ángulo γ 1 {\displaystyle \gamma _{1}} con respecto a su posición inicial a lo largo del eje x y x ^ 2 {\displaystyle {\hat {\mathbf {x}} }}_{2}} {hat {\mathbf {x}} {3206> está en el ángulo γ 2 {\displaystyle \gamma _{2}} con respecto a su posición inicial a lo largo del eje y.
x ^ 1 {\displaystyle {\hat {\mathbf {x}} }}_{1}} {hat {\mathbf {x}} }}_{1} está confinado en el «plano rojo» del diagrama y está relacionado con γ 1 {\displaystyle \gamma _{1}} mediante:
x ^ 1 = {\displaystyle {\hat {\mathbf {x} {{1}}={1}} de la izquierda.
{{displaystyle {\hat {\mathbf {x}} {6955>
x ^ 2 {{pantalla}} {{mathbf}} {{x}} }}_{2}} {que {mathbf {x}} }}_{2} está confinado al «plano azul» en el diagrama y es el resultado del vector unitario en el eje x ^ = {\displaystyle {\hat {x}}=}  siendo rotado a través de los ángulos de Euler :
siendo rotado a través de los ángulos de Euler :
x ^ 2 = {\displaystyle {\hat {\mathbf {x}} {{2}}=Izquierda}}
{\displaystyle {\hat {\mathbf {x}} {2098>
Una restricción sobre la x ^ 1 {{displaystyle}{hat}{mathbf}{x}} }}_{1}} {hat {\mathbf {x}} {5222> y x ^ 2 {\displaystyle {hat {\mathbf {x}} }}_{2}}  vectores es que, al estar fijos en el cardán, deben permanecer en ángulo recto entre sí. Esto es así cuando su producto punto es igual a cero:
vectores es que, al estar fijos en el cardán, deben permanecer en ángulo recto entre sí. Esto es así cuando su producto punto es igual a cero:
x ^ 1 ⋅ x ^ 2 = 0 {\displaystyle {\hat {\mathbf {x} {1}\cdot {hat {\mathbf {x}}} {{1}{\cdot {\hat {\mathbf {x}} }}_{2}=0}

Por lo tanto la ecuación de movimiento que relaciona las dos posiciones angulares viene dada por:
tan γ 1 = cos β tan γ 2 {\displaystyle \tan \gamma _{1}=\cos \beta \tan \gamma _{2}\,

con una solución formal para γ 2 {\displaystyle \gamma _{2}} :
γ 2 = tan – 1 {\displaystyle \gamma _{2}=\tan ^{-1}\left,}

La solución para γ 2 {\displaystyle \gamma _{2}} no es única ya que la función arctangente es multivaluada, sin embargo se requiere que la solución para γ 2 {\displaystyle \gamma _{2}} ser continua sobre los ángulos de interés. Por ejemplo, la siguiente solución explícita utilizando la función atan2(y, x) será válida para – π < γ 1 < π {\displaystyle -\pi <\gamma _{1}<\pi }  :
:
γ 2 = atan2 ( sin γ 1 , cos β cos γ 1 ) {\displaystyle \gamma _{2}=\operatorname {atan2} \left(\sin \gamma _{1},\cos \beta \,\cos \gamma _{1}\right)}

Los ángulos γ 1 {\displaystyle \gamma _{1}} y γ 2 {pantalla \gamma _{2}} en una junta rotativa serán funciones del tiempo. Diferenciando la ecuación del movimiento con respecto al tiempo y utilizando la propia ecuación del movimiento para eliminar una variable se obtiene la relación entre las velocidades angulares ω 1 = d γ 1 / d t {\displaystyle \omega _{1}=d\gamma _{1}}/dt} {\displaystyle \omega _{1}=d\gamma _{1}}/dt} {displaystyle \omega _{1}=d\gamma _{1}/dt} y ω 2 = d γ 2 / d t {\displaystyle \omega _{2}=d\gamma _{2}/dt}  :
:
ω 2 = ω 1 ( cos β 1 – sen 2 β cos 2 γ 1 ) {\displaystyle \omega _{2}=\omega _{1}\left({\frac {\cos \beta }{1-\sin ^{2}\beta \,\{740>{displaystyle \omega _{2}=\omega _{1}}left({\frac {\cos \beta }{1-\sin ^{2}\beta \,\Como se muestra en los gráficos, las velocidades angulares no están relacionadas linealmente, sino que son periódicas con un período igual a la mitad del de los ejes giratorios. La ecuación de la velocidad angular se puede diferenciar de nuevo para obtener la relación entre las aceleraciones angulares a 1 {\displaystyle a_{1}} y a 2 {\displaystyle a_{2}}.

y a 2 {displaystyle a_{2}}

:
a 2 = a 1 cos β 1 – sin 2 β cos 2 γ 1 – ω 1 2 cos β sin 2 β sin 2 γ 1 ( 1 – sin 2 β cos 2 γ 1 ) 2 {\displaystyle a_{2}={frac {a_{1}cos \beta }{1–sin ^{2}\beta \,\{{cos ^{2}{gamma _{1}}}-{frac {\omega _{1}^{2}{cos \beta \}{sin ^{2}{beta \}{sin 2{gamma _{1}}{izquierda(1-{sin ^2}{beta \}{cos ^{2}{gamma _{1}{derecha)^{2}}}}

Eje Cardán doble

Juntas universales en un eje de transmisión
Una configuración conocida como eje de transmisión de doble junta Cardan supera parcialmente el problema de la rotación brusca. Esta configuración utiliza dos juntas en U unidas por un eje intermedio, con la segunda junta en U desfasada con respecto a la primera para anular el cambio de velocidad angular. En esta configuración, la velocidad angular del eje conducido coincidirá con la del eje motriz, siempre que tanto el eje motriz como el eje conducido estén en ángulos iguales con respecto al eje intermedio (pero no necesariamente en el mismo plano) y que las dos juntas universales estén desfasadas 90 grados. Este conjunto se emplea comúnmente en los vehículos de tracción trasera, donde se conoce como eje motriz o eje de hélice (prop).
Incluso cuando los ejes motriz y conducido están en ángulos iguales con respecto al eje intermedio, si estos ángulos son mayores que cero, se aplican momentos oscilantes a los tres ejes mientras giran. Estos tienden a doblarlos en una dirección perpendicular al plano común de los ejes. Esto aplica fuerzas a los cojinetes de apoyo y puede provocar «temblores de lanzamiento» en los vehículos de tracción trasera. El eje intermedio también tendrá un componente sinusoidal en su velocidad angular, que contribuye a la vibración y a las tensiones.
Matemáticamente, esto se puede mostrar como sigue: Si γ 1 {\displaystyle \gamma _{1}\},} y γ 2 {\displaystyle \gamma _{2}\},} son los ángulos de entrada y salida de la junta universal que conecta el eje motriz y el intermedio, respectivamente, y γ 3 {\displaystyle \gamma _{3}\},}  y γ 4 {\displaystyle \gamma _{4}\},}
y γ 4 {\displaystyle \gamma _{4}\},}  son los ángulos para la entrada y la salida de la junta universal que conecta los ejes intermedios y de salida respectivamente, y cada par está en el ángulo β {\displaystyle \beta \},}
son los ángulos para la entrada y la salida de la junta universal que conecta los ejes intermedios y de salida respectivamente, y cada par está en el ángulo β {\displaystyle \beta \},}  con respecto a la otra, entonces:
con respecto a la otra, entonces:
tan γ 2 = cos β tan γ 1 tan γ 4 = cos β tan γ 3 {\displaystyle \tan \gamma _{2}=\cos \beta \tan \gamma _{1}qquad \tan \gamma _{4}=\cos \beta \tan \gamma _{3}}

Si la segunda junta universal se gira 90 grados con respecto a la primera, entonces γ 3 = γ 2 + π / 2 {\displaystyle \gamma _{3}=\gamma _{2}+\pi /2}  . Usando el hecho de que tan ( γ + π / 2 ) = 1 / tan γ {\displaystyle \tan(\gamma +\pi /2)=1/\tan \gamma }
. Usando el hecho de que tan ( γ + π / 2 ) = 1 / tan γ {\displaystyle \tan(\gamma +\pi /2)=1/\tan \gamma }  se obtiene:
se obtiene:
tan γ 4 = cos β tan γ 2 = 1 tan γ 1 = tan ( γ 1 + π 2 ) {\displaystyle \tan \gamma _{4}={\frac {\cos \beta }{\tan \gamma _{2}}={\frac {1}{\tan \gamma _{1}}={\tan \left(\gamma _{1}+{\frac {\pi }{2}}right)\},

y se ve que la transmisión de salida está desfasada sólo 90 grados con respecto al eje de entrada, lo que produce una transmisión de velocidad constante.
NOTA: La referencia para medir los ángulos de los ejes de entrada y salida de la junta universal son ejes mutuamente perpendiculares. Por lo tanto, en sentido absoluto las horquillas del eje intermedio son paralelas entre sí. (Ya que, una horquilla está actuando como entrada y la otra horquilla está actuando como salida para los ejes y por encima de 90 grados de diferencia de fase se menciona entre las horquillas.)
Doble junta Cardan
Artículo principal: Junta de velocidad constante § Doble Cardan
Una junta Cardan doble consiste en dos juntas universales montadas espalda con espalda con un yugo central; el yugo central sustituye al eje intermedio. Siempre que el ángulo entre el eje de entrada y el yugo central sea igual al ángulo entre el yugo central y el eje de salida, la segunda junta Cardan cancelará los errores de velocidad introducidos por la primera junta Cardan y la junta Cardan doble alineada actuará como una junta CV.
Acoplamiento Thompson
Artículo principal: Junta de velocidad constante § Acoplamiento Thompson
Un acoplamiento Thompson es una versión refinada de la junta de doble Cardán. Ofrece una eficiencia ligeramente mayor con la penalización de un gran aumento de la complejidad.
Véase también
- ^ UjjwalRane (8 de julio de 2010). «Cinemática con MicroStation – Ch02 J Hookes Joint». Archivado desde el original el 11 de marzo de 2016. Recuperado el 4 de mayo de 2018 – vía YouTube.
- ^ ver: «Junta universal – Inventada por Gerolamo Cardano» «Junta universal,Inventores de la junta universal». Archivado desde el original el 2017-04-22. Recuperado 2017-04-21.
- ^ Ver:
- Tony Rothman (2013) «Cardano v. Tartaglia: The Great Feud Goes Supernatural», p. 25. Disponible en línea en: Arxiv.org. (Nótese que Rothman menciona el error de Wikipedia respecto a la supuesta invención de Cardano de la junta universal.)
- Hans-Christoph Seherr-Thoss, Friedrich Schmelz, Erich Aucktor, Universal Joints and Driveshafts: Analysis, Design, Applications (Berlín, Alemania: Springer Verlag, 1992), p. 1
- Marie Boas, The Scientific Renaissance: 1450-1630 (Nueva York, New York: Harper Brothers, 1962), p. 186 Archived 2016-04-11 at the Wayback Machine.
- James Eckman, Jerome Cardan (Baltimore, Maryland: The Johns Hopkins Press, 1946.), p. 77.
- Hieronymi Cardanime (Gerolamo Cardano), De Subtilitate Libri XXI. (Sobre las cosas sutiles en 21 libros) (Basilea, Suiza: Sebastian Henric Petri, 1553), Liber XVII. De Artibus, Artificiosisque; rebus. (Libro 17. Sobre los oficios y los ingenios), p. 817. (Nota: (1) Este libro es una reimpresión del original de 1500. (2) En el margen de la p. 817 está impreso: Sedes mira (silla milagrosa). De la p. 817: Archivado 2017-10-11 en la Wayback Machine «Simili ratione inventũ est, ut Cæsaris sedes ita disponeretur, ut quocumque situ constituatur, ille immobilis, ac commodè dum vehitur sedeat. Hoc tractum ex armillarum ratione: cum enim circuli tres chalybei constituentur, polis sursum, deorsum, antè, retro, dextra ac sinistra mobilibus, cum plures non possint esse situs, necesse est ipsum in essedo quomodocumque agatur quiescere perpetuò». (Por un razonamiento similar, se ha encontrado que la silla del Emperador podría estar dispuesta de tal manera que se fijara en cualquier orientación que se decidiera y se sentara cómodamente mientras es transportado. Esto se basa en la lógica del montaje del cardán: los tres anillos de acero están dispuestos por los polos móviles hacia arriba, hacia abajo, hacia adelante, hacia atrás, hacia la derecha y hacia la izquierda, cuando más no se puede permitir, es necesario que él en el carro de alguna manera ser hecho para permanecer quieto constantemente.)
- Hieronymi Cardani (Gerolamo Cardano), Mediolanensis Philosophi ac Medici Celeberrimi Operum (Lyon (Lugdunum), Francia: Jean Antoine Huguetan y Marc Antoine Ravaud, 1663), vol. 10: Opuscula miscellanea (Obras varias), Paralipomenon (Suplemento), Liber V. De rebus factis raris & artificiis (Libro 5. De las cosas raras e ingeniosamente hechas), Caput VII. De Armillarum instrumento (Capítulo 7. Sobre el armilar), pp. 488-489.
- ^ a b c Mills, Allan, «Robert Hooke’s ‘universal joint’ and its application to sundials and the sundial-clock», Notes & Records of the Royal Society, 2007, accessed online Archived 2015-09-25 at the Wayback Machine 2010-06-16
- ^ Gasparis Schotti, Technica Curiosa, sive Mirabilia Artis, Libris XII. … (Nuremberg (Norimberga), (Alemania): Johannes Andreas Endter & Wolfgang Endter, 1664), Liber IX. Mirabilia Chronometrica, … (Libro 9. Relojes maravillosos, … ), Caput V. Signa chronometrica optica, seu indices. (Capítulo 5. Relojes visuales maravillosos, o relojes con agujas), pp. 664-665: Propositio XX. Indicem sinuosum & obliquatum per anfractus quosvis, sine Rotis dentatis quocumque lubet educere. (Proposición 20. sin ningún tipo de engranaje, para conducir el puntero que gira y se retuerce por cualquier recodo que se desee). En el margen está impreso: Vide Iconismo. VII. Fig. 32. (Véase la lámina 7, figura 32.), que representa la junta universal de Schott. Schott señala en primer lugar que puede haber ocasiones en las que el engranaje de un reloj funciona y su esfera no puede alinearse convenientemente; por ejemplo, los relojes públicos instalados en torres. A continuación, menciona, en la descripción de su construcción (Technasma, palabra griega que significa «artificio»), que la junta universal se asemeja a un cardán que se utiliza para sostener una lámpara de aceite para que no se derrame. La junta de Schott consta de dos horquillas (fuscinula), cada una de las cuales está formada por un eje al que se une una tira metálica, doblada en forma de semicírculo, en un extremo. Cerca de cada extremo del semicírculo, se perfora un agujero. También se hace una cruz con cuatro brazos perpendiculares (crux sive 4 brachia). Los agujeros de cada semicírculo encajan en los extremos de un par de brazos opuestos. El ángulo entre los ejes debe ser mayor que un ángulo recto. Al hablar del movimiento de la articulación (Motus), Schott afirma que los dos ejes se mueven a la misma velocidad (es decir, forman una articulación de velocidad constante): » … horum autem ductum necesse est sequatur & altera fuscinula, parique cum priore illa feratur velocitate: unde si fuerit unius fuscinulae motus regularis circularis, erit similis & alterius … » ( … pero este conducido debe seguir a la otra horquilla, y nacer a una velocidad igual a la primera: de donde si el movimiento de una horquilla fuera regularmente circular, será similar con la otra … ).
- ^ Para una historia (parcial) de las juntas universales, véase: Robert Willis, Principles of Mechanism … , 2ª ed. (Londres, Inglaterra: Longmans, Green, and Co., 1870), Part the Fifth: On Universal Joints, pp. 437-457.
- ^ «universal, a. (adv.) y n.», para.13, Oxford English Dictionary Online, consultado 2010-06-16
- ^ Hooke describió por primera vez una junta universal en el instrumento de Hevelius en: Robert Hooke, Animadversions on the first part of the Machina Coelestis … (Londres, Inglaterra: John Martyn, 1674), p. 73. Aquí llama a la articulación un «instrumento universal». De la página 73: Mostraré » … el uso que he hecho de este Joynt, como instrumento universal para marcar, para igualar el tiempo, para hacer que la manecilla de un reloj se mueva a la sombra de un estilo, y para realizar una multitud de otras operaciones mecánicas». La articulación está representada en la Placa X, Fig.s 22 y 23, que están disponibles en: Posner Memorial Collection – Carnegie Mellon University Archivado 2015-11-17 en la Wayback Machine
- ^ Robert Hooke, A Description of Helioscopes, and Some Other Instruments (Londres, Inglaterra: John Martyn, 1676), p. 14. De la p. 14: «El Joynt Universal para toda esta manera de Operaciones, no habiendo tenido tiempo de describir el último Ejercicio, lo explicaré ahora más particularmente». Las ilustraciones de la articulación universal de Hooke aparecen en la p. 40, Fig.s 9 y 10; disponible en: ETU Library ; Zurich, Switzerland Archived 2015-09-23 at the Wayback Machine.
- ^ a b Review of Ferdinand Berthoud’s Treatise on Marine Clocks, Appendix Art. VIII, The Monthly Review or Literary Journal, Vol. L, 1774; véase la nota a pie de página, página 565.
- ^ Gunther, Robert Theodore, Early Science in Oxford, vol. 7: «Life and work of Robert Hooke, Part II» (Oxford, Inglaterra: Dawsons of Pall Mall, 1930), pp. 621-622.
- ^ Willis, Robert, Principles of Mechanisms, … (Londres, Inglaterra: John W. Parker, 1841), pp. 272-284.
- ^ J. V. Poncelet, Traité de mécanique appliquée aux machines, Part 1 (Lieja, Francia: Librairie scientifique et industrielle, 1845), pp. 121-124.
- ^ Edmund P. Morewood, Improvement in Coating Iron and Copper, U.S. Patent 3,746, Sept. 17, 1844.
- ^ Ephraim Shay, Locomotive-Engine, U.S. Patent 242,992, June 14, 1881.
- ^ Charles H. Amidon, Bit-Brace, U.S. Patent 298,542, May 13, 1884.
- ^ Douglas Self. «The Tower Spherical Engine».
- ^ William P. Blake, Report of the Commissioner to the Paris Exposition, 1867, Chapter 1, Transactions of the California State Agricultural Society, During the Years 1866 and 1867, Vol X, Gelwicks, Sacramento, 1868.
- ^ The Dynamometer Balance, , Vol. XXV, No. CLVI (Dec. 1881); página 471.
- ^ Soporte de rodamiento de altura ajustable controlado electrónicamente – Patente de EE.UU. 6345680 Archivada el 5 de febrero de 2009, en la Wayback Machine
- Teoría de Máquinas 3 de la Universidad Nacional de Irlanda
- por Sándor Kabai, Proyecto de Demostraciones Wolfram.
- DIY: Replacing Universal Joints at About.com.
- Thompson Couplings Limited explanation of the Thompson coupling.
- Universal Joint Failure – Custom Solutions Address Common Problems
- Universal Joint Phasing – The Concept and Importance of Drive Shaft Phasing and Alignment
- The Thompson Coupling – invented by Glenn Thompson by ABC Television (The New Inventors, broadcast Feb 2007).
- Patente estadounidense 7,144,326 (acoplamiento de velocidad constante).
- Sobre juntas universales en McMaster Carr.
- Eje Cardan en McMaster Carr.






